機体 物理挙動 設定
この節を始める前に、(機体 3Dモデル・同期設定)を必ず終わらせてください。
もしくは、FDMi - Exampleパッケージ中に含まれるサンプル例を開いて確認して下さい。
この章で説明している内容の根底は、航空力学の知識を要するものです。
(FDMiは物理挙動になるべく忠実にすることで、”パラメータ調節”の簡素化を目指しています。その代償として物理的に正しく設定しないとうまく飛びません。)
現時点の本項では「設定したけど飛ばない!」「チューニングの仕方がわからない!」への対処法は記載できていません。
上手くいかない場合は、現状は製作者(本ページフッターに記載)までお問い合わせいただければ幸いです。
機体のチューニングの参考文献として、以下が非常に参考になります。是非ご活用ください。(随時追加予定/以下は別頁分離予定)
mtk_birdman https://mtkbirdman.com
日本語資料の中で特にわかりやすい。
UIUC Applied Aerodynamics Group https://m-selig.ae.illinois.edu
- Incomplete Guide to Airfoil Usage https://m-selig.ae.illinois.edu/ads/aircraft.html
- 代表的な機体の翼型が記載されています
- UIUC Low-Speed Airfoil Tests https://m-selig.ae.illinois.edu/uiuc_lsat.html
- 代表的な翼型の2次元翼特性(Cl-Alpha, Cd-Alpha)が記載されています。
- ただし、低速風洞データでRe数が低いので、高速機に適用する際はDATCOMの理論値の方が適当かも。
サンプル機に同様の設定を施してあります。お手元に用意して、参考にしてください。
以下の記事内容は、まず文字は見ず、記事中の図とサンプルをみることをお勧めします。
概要
この章では、FDMiにおける物理挙動の設定方法を説明します。
流れとしては以下の通りです。
- タイヤ
- 位置・大気・風速(ADIRU)
- エンジン
- 主翼
- 尾翼
- 機体重量・重心・モーメント
- 胴体抵抗
- 操縦系
以下の設定は、基本Vehicle/Physics以下に行います。
Vehicle/Physicsには、FDMiObjectActivatorIsPilotを配置してあります。
これにより、機体の同期オーナーが、機内にいるときのみ物理演算が行われるようになります。
1. タイヤ
まず、機体を支える”タイヤ”をセットアップします。
タイヤ自体はUnity標準のWheelColliderを使用します。追加で、タイヤに関する制御を行うFDMiWheelを設定します。
WheelColliderは、(内部実装が4輪前提?なのか)4つ丁度配置すると計算が良い感じになります。
ほとんどの機体の場合、前輪に2つ、主脚に2つにすればよいはずです。
FDMiWheelとWheelColliderは、サンプル例を参考に、以下の通り設定します。
WheelCollider
- WheelMass
- ばね下の動きを示します。タイヤ+サスペンションの重みとして、少し重めに設定してください。
- WheelDampingRate
- タイヤの慣性です。タイヤの抵抗はここで調整してください。
- ForceAppPointDistance
- タイヤが力を伝える位置です。タイヤの接地面より上なら基本的に問題ないらしい?
- Suspension Spring
- 機体を地面にたたきつけて、いい感じの値を割り出してください。
- 「Play(上側再生ボタン)」⇒「機体の椅子に座った状態で一時停止」⇒「Rigidbodyのコンポーネントを上側に移動」で、機体を地面から浮かせられます
- おおむね、機体重量に比例するはずです。
- 機体を地面にたたきつけて、いい感じの値を割り出してください。
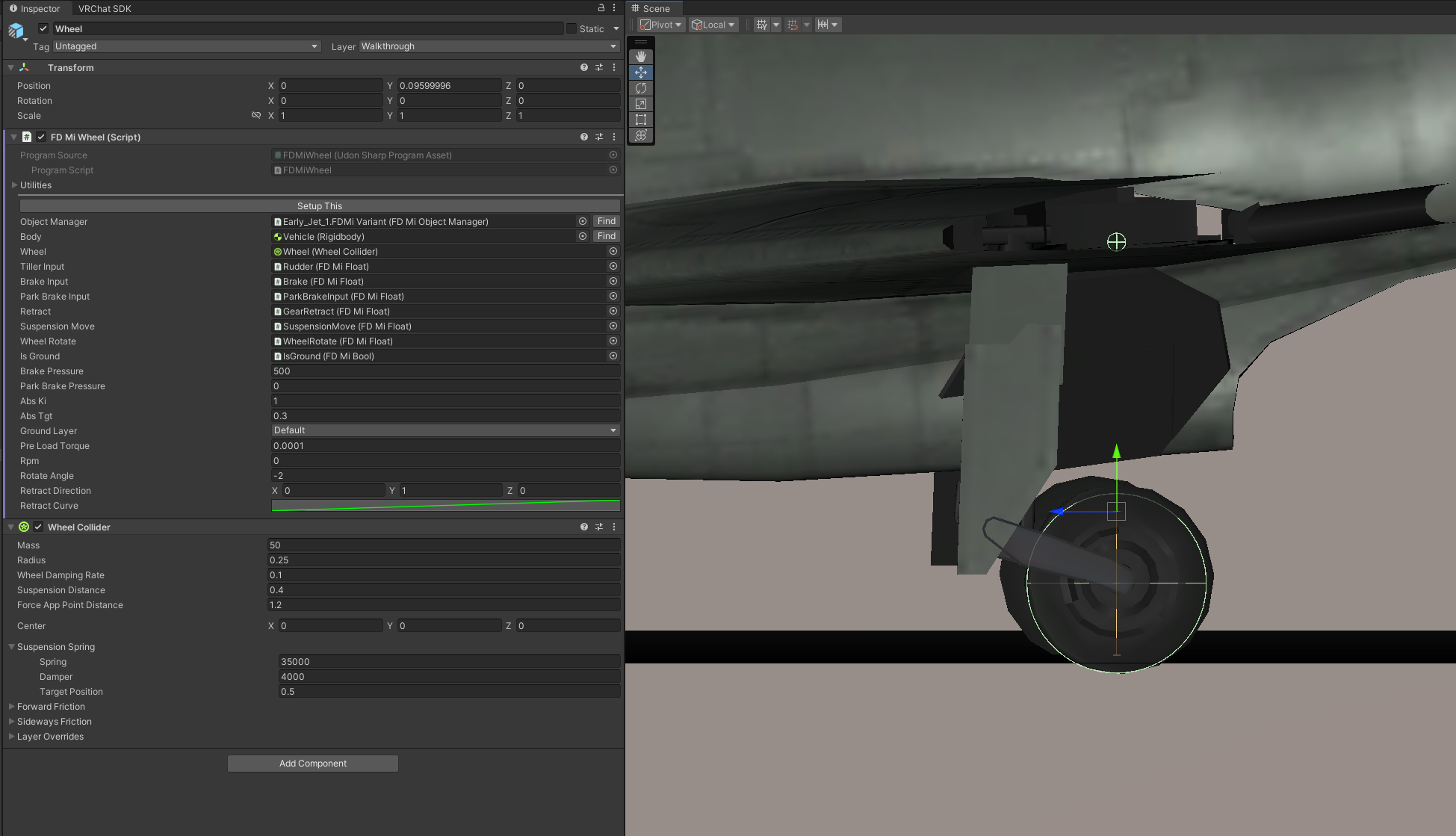
FDMiWheel
- TillerInput
- タイヤを左右に傾ける入力です
- タイヤの角度は
rotateAngle*TillerInput.data(°)、右向き正で計算します
- BrakeInput
- タイヤのブレーキ入力です
- WheelColliderのBrakeTorqueとして、
brakePressure*brakePressure.dataを代入します
- ParkBrakeInput
- パーキングブレーキの入力です
- WheelColliderのBrakeTorqueとして、
parkBrakePressure*ParkBrakeInput.dataを代入します
- Retract
- 脚の格納です
- retractDirectionの方向に、
retractCurve(Retract.data)分Transformを移動させます
- absKi,absTgt
- タイヤのABS機能の設定値です。十分大きな値が入っていれば、基本無問題です。
- preLoadTorque
- タイヤに少しだけ前進方向のトルクを与えます。かならず正方向に微小な値を入力してください。
- これが0のとき、機体は前進できません。
2. 位置・大気・風速(ADIRU)
機体自身の置かれている状況を計算します。ここで計算されたデータを基に、FDMiは空気力の計算を行います。
※※ TODO (ADIRUの概念図) ※※
ここで取り扱うデータは、一般的な航空機のADIRU(Air Data/ Inertial Reference Unit)に相当するものになります。 ただし、実機におけるADIRUは「センシングしたデータから、機体の状況を把握する」ものなのに対し、FDMiのそれは「機体の状況に関するデータを”生成”する」ものであることに注意してください。
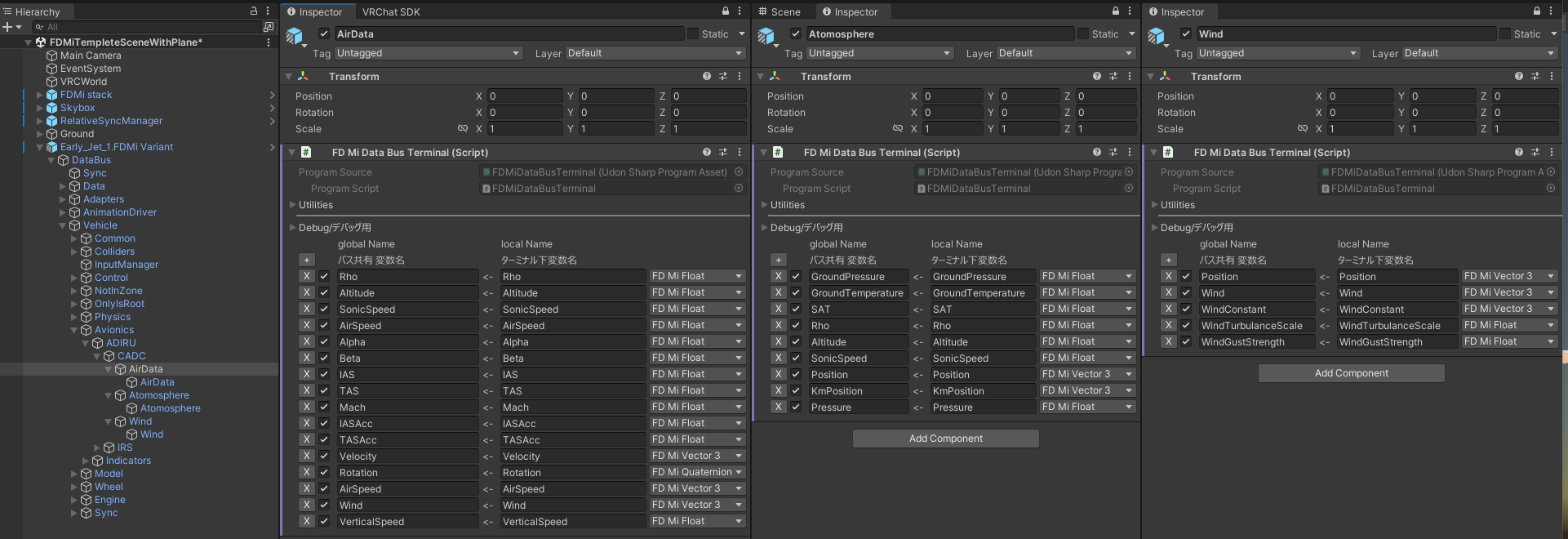
ここでは、サンプル機のDatabus/Vehicle/Avionics/ADIRUを流用する形とします。
ただし、ADIRUはFDMiObjectActivateInZoneの子にして、機内のみで動作させるようにします。
(新しい機体を作成するときは、Databus/Vehicle/Avionicsを丸ごと、新機体のDatabus/Vehicleの下に置きます)
※下図の項目は設定をサンプル機そのままにして導入してください
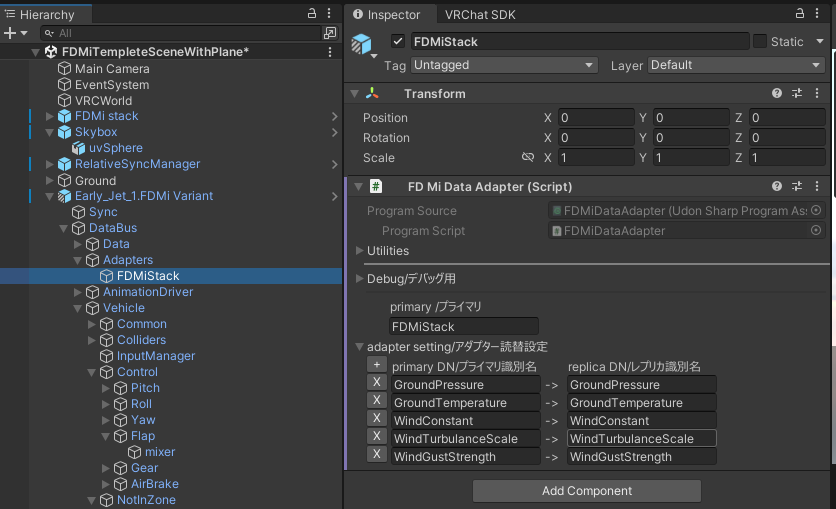
次に、Databus/Adaptersを設定します。これは、機体外で設定された、大気(地面の気圧・気温・風速)を機体に適用するものです。(機体の外にあるFDMiDataの情報を、機内に接続します。)
Databus/Adapters/FDMiStackを、新機体にコピーしてください。
3. エンジン
エンジンを設定します。
今回は、ジェットエンジンを設定します。
まず、エンジンの出力はFDMiSimpleJetEngineのZ軸方向に働きます。位置・角度を調整してください。
基本的には、サンプル機のジェットエンジンをチューニングする形とさせて下さい。
※※ TODO (N1,N2の概念図) ※※
また、エンジン始動時は、以下の形になりますので、適当な値を入れてください。
AirSW.data=1の状態だと、N2がmaxAirN2に向かい、秒間N2Airdt増加する。このときスロットル操作は影響なしN2 >= N2FuelThresholdの状態で、FuelSW.data=1とすると、スロットル操作が有効になるAirSW > maxAirN2の状態になると、AirSWは0になるFuelSW=0でスロットル操作無効、N2は0に向け減少する
複数のエンジンを取り付ける際は、FDMiDataBusTerminalの、☑のついた項目のglobal Nameをかぶらせないよう設定してください。
これに関して、エラーは発生しないので、気を付けて実装してください。
4. 主翼
次に、主翼を設定します。サンプル機のDatabus/Vehicle/Physics/Wing/mainFoilを参考にしてください。
※ パイロットのみが計算を担当するよう、FDMiObjectActivateIsPilotの子に配置してください。通常Databus/Vehicle/Physicsの子に配置します。
- 翼の区間を、ある程度分割しつつ
FDMiWingSectionで定義してください。
- 翼前縁をtransformの位置、翼後縁を、
chordLengthで伸びる線の先端で定義してください 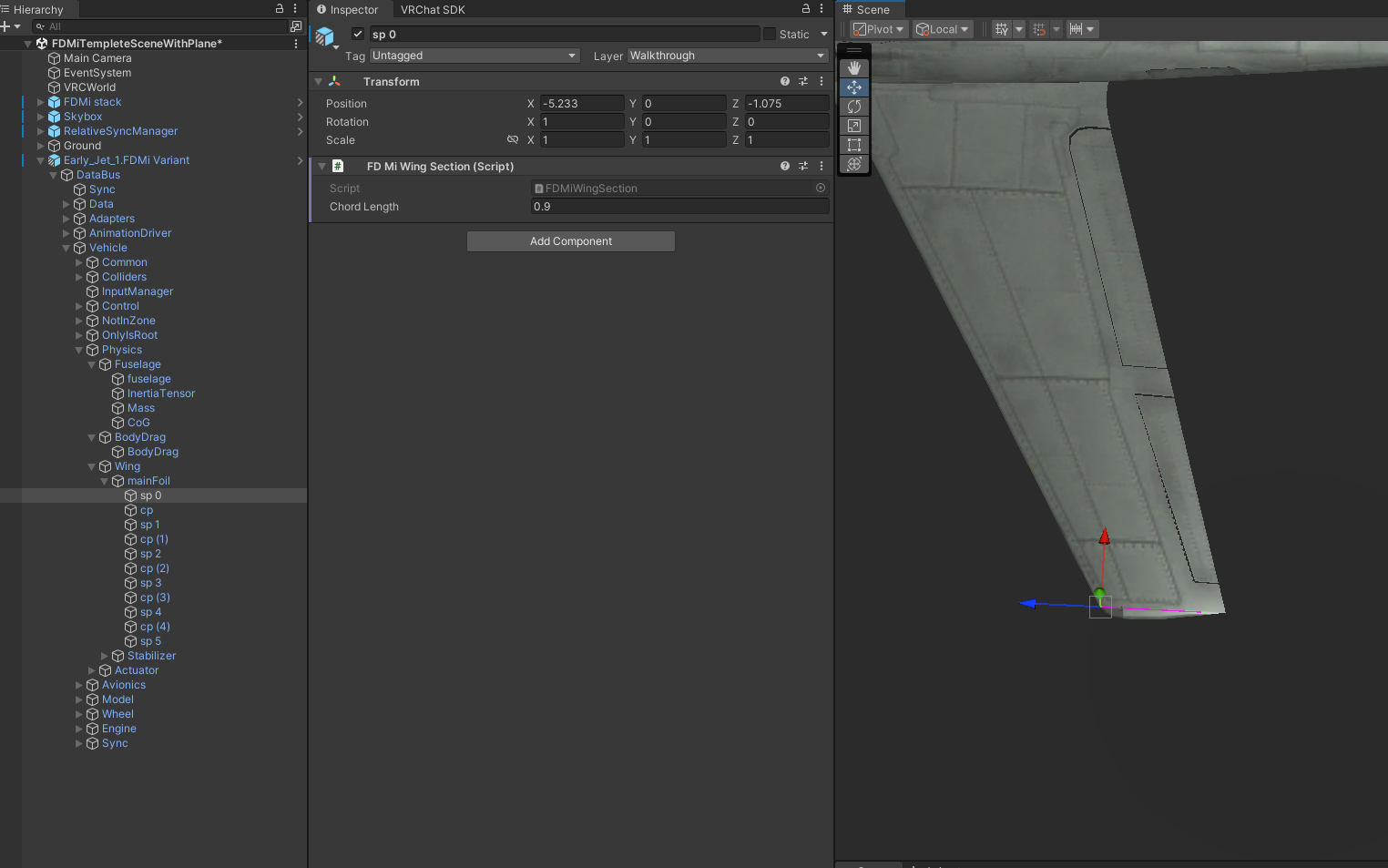
- 二つの
FDMiWingSectionに挟まれた位置に、FDMiwingを配置します
- このとき、
FDMiwingの Hierarchy上側 に左側のFDMiWingSection、Hierarchy下側 に右側のFDMiWingSectionが来るように配置します。 - 配置したら、
SectionLとSectionRの横 Meybe ボタンを押します。 - 次にSetup Thisボタンを押します。
- ここまでで、Y軸が翼の上側に来ていることを確認します。
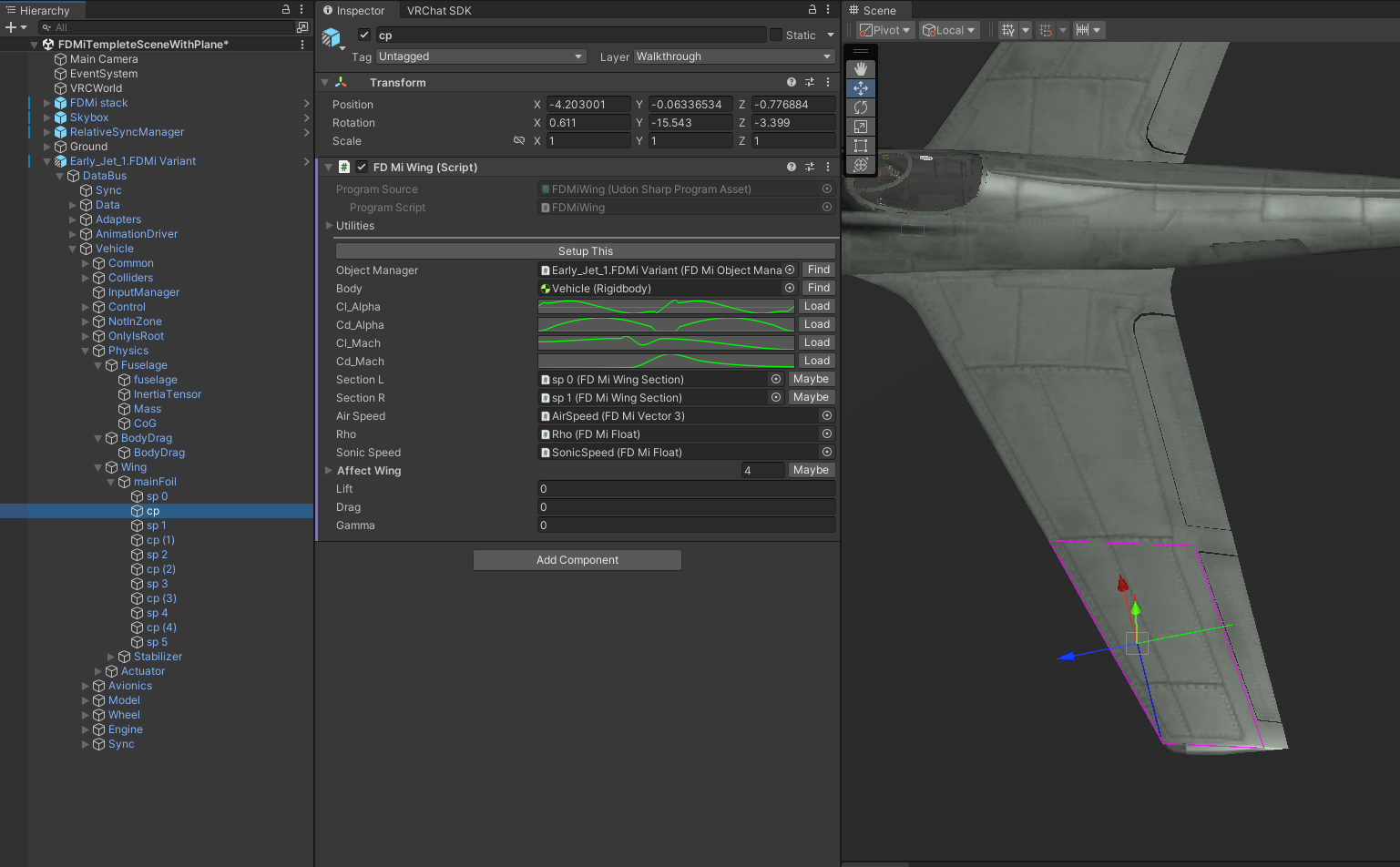
- 以下の翼特性を入力します
Cl_Alpha,Cd_Alpha: 翼の迎角(空気の流れと翼の角度差)に応じた揚力/抗力の出方をチューニングします。Cl_Mach,Cd_Mach:翼のマッハ数に応じた揚力/抗力の出方をチューニングします。サンプル機の値でまず試します。affected wing: 現在バグがあるので、埋めなくて大丈夫です。(Maybeを押して埋めても影響小。放置で良い)
- 1~3を繰り返し、翼の形を作成します。
- 最後に、上部
FDMi/Setup Allを押します。
FDMiwingのコンポーネントが増加した際には、必ずFDMi/Setup Allを実行してください。
翼が機体に登録されず、Exceptionが発生します。
Cl-Alpha, Cd-Alphaは特にこだわりなき場合、サンプル機の数字で良いと思います。 ただし、戦闘機やアクロバット機のときは、主翼も尾翼の値で設定してあげます。
そのままだとほとんどの機体が翼端失速を起こすので、翼の左右の端のFDMiWingSectionに、ねじり下げ(Z軸が少し下を向くくらい?)を設定してください。
この挙動はバグで、修正予定です。(本来affected wingで計算する箇所だった)
5. 尾翼
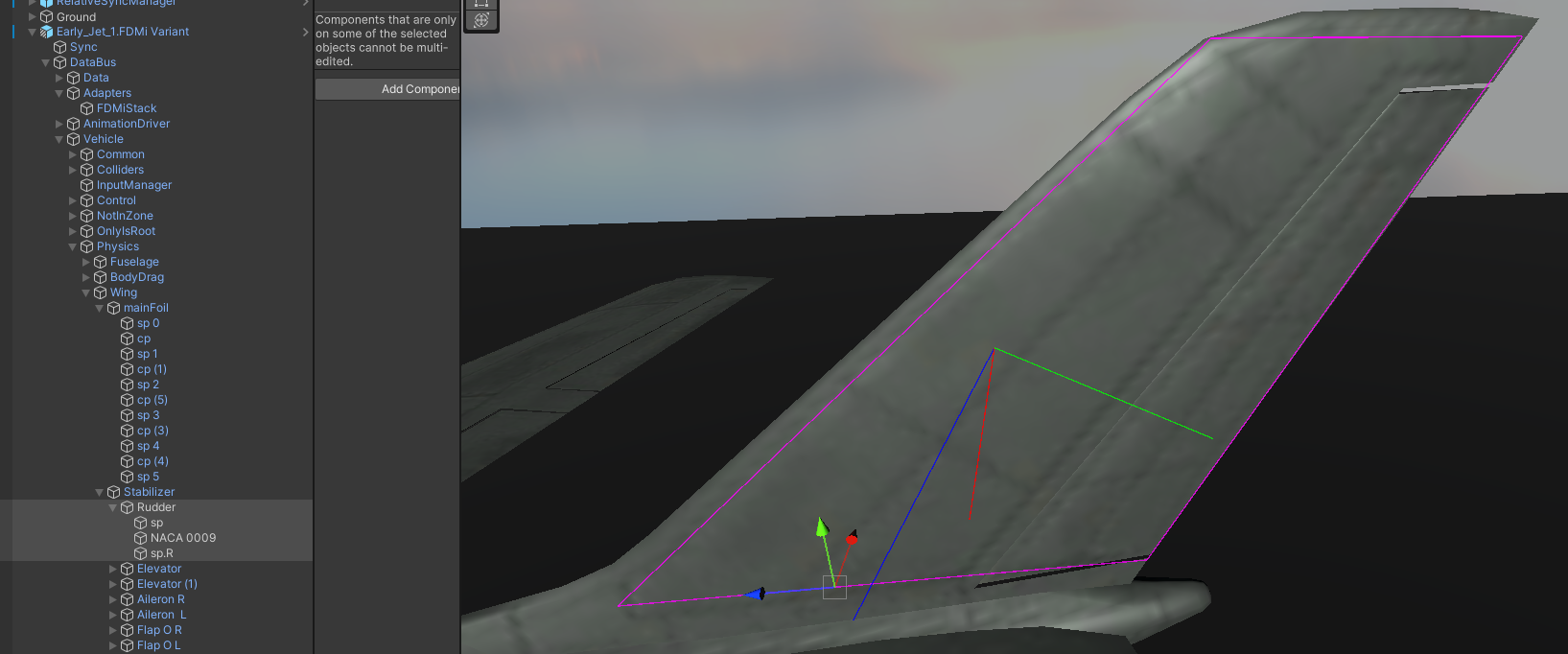
次に、尾翼を設定します。主翼と同様に、尾翼の形を設定します。
垂直尾翼のSectionL,SectionRの上下関係は、どちらでも大丈夫です。
尾翼の考え方ですが、2通りあります。どちらでも構いません。
- 尾翼が「全体の舵の何%か」⇒「尾翼全体が何°回ったことに相当するか」で計算
- 参考: https://mtkbirdman.com/tail-detail-design 「舵面サイズの決定」
- 尾翼舵面と固定部を分けて、舵面のみ回転させる
ここで、尾翼の舵を設定します。 尾翼舵は、Transformを回転させて行います。以下のどちらでも構いません。
- 機体のボーンに連動させる
FDMiWingの親にコンポーネントを配置し、回転させる
今回は後者で設定を行います。
サンプル機の通り、FDMiwingの親にTransformを設定し、FDMiwingの回転軸に合わせるように配置します。
6. 機体重量・重心・モーメント
ここで、機体重量・重心・モーメントを設定します。
サンプル機の通り、FDMiFuselageをDatabus/Vehicle/Physics/fuselageに配置します。
※ パイロットのみが計算を担当するよう、FDMiObjectActivateIsPilotの子に配置してください。通常Databus/Vehicle/Physicsの子に配置します。
機体重量
FDMiFuselageのOverride Massを有効化(☑)すると、Rigidbody.MassをMass.dataの値に上書きします。
慣性モーメント
機体の”回転の重さ”です。
FDMiFuselageのOverride Inertiaを有効化(☑)すると、Rigidbody.inertiaTensorをInertiaTensor.dataの値に上書きします。
ここは、詳しくない場合は無効化してください。その場合、Unityのコライダーの大きさで、回転の重さを調整してください。
慣性モーメントは、現実にある類似機の代表値を入れて、操舵が重たい場合は減らしていく形で調整してください。 (Cessna 172, B737, F-16あたりの値で試すことをお勧めします)
重心
FDMiFuselageのOverride Cogを有効化(☑)すると、Rigidbody.centerOfMassをCoG.dataの値に上書きします。
CoGのVector3の値を設定します。Transformをずらして、いい感じになった所のRigidbodyの位置からの距離を、CoG.dataに入れます。
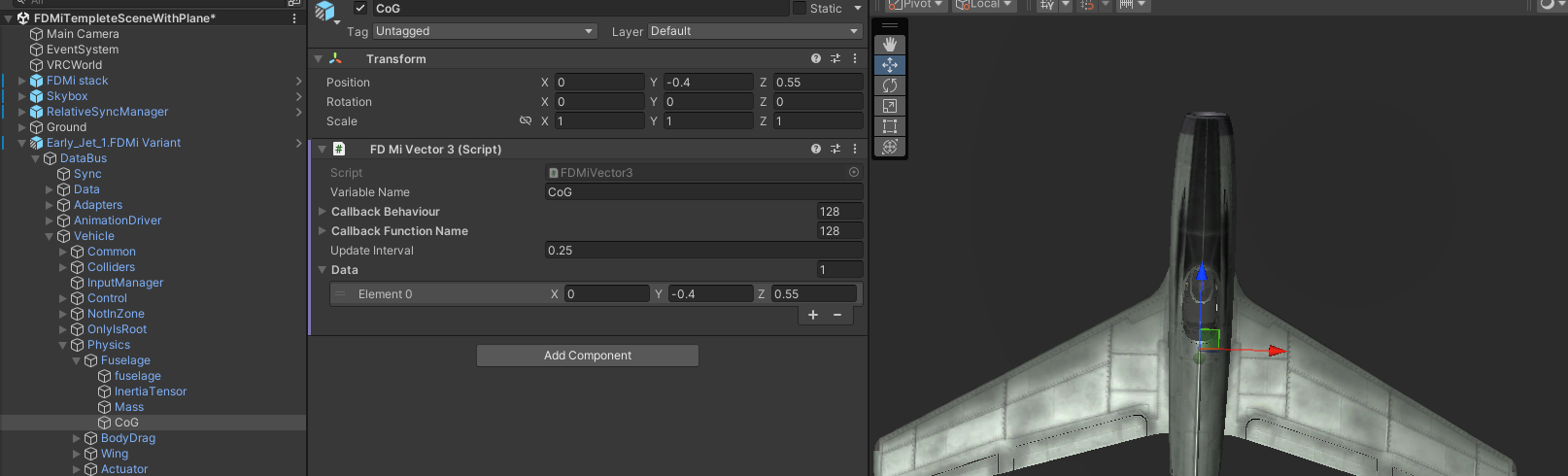
基本的に、重心は以下の制約を満たして下さい。
- 前後のギアの中間のどこか
- 翼の生えている位置の、中ほどから前半あたり
操縦特性が重たい時は重心を後ろより、軽いときは前よりにしてみてください。 重心位置と翼の配置が正しければそれなりに飛ぶはずです。
7. 胴体抵抗
胴体抵抗の設定を行います。 FDMiDragBodyをDatabus/Vehicle/Physics/bodyDragに配置します。
※ パイロットのみが計算を担当するよう、FDMiObjectActivateIsPilotの子に配置してください。通常Databus/Vehicle/Physicsの子に配置します。
D,Lを調節し、機体と、黄色いカプセルコライダーの大きさが大体同じになるように調節してください。- Transformの中心位置は重心付近に配置します。
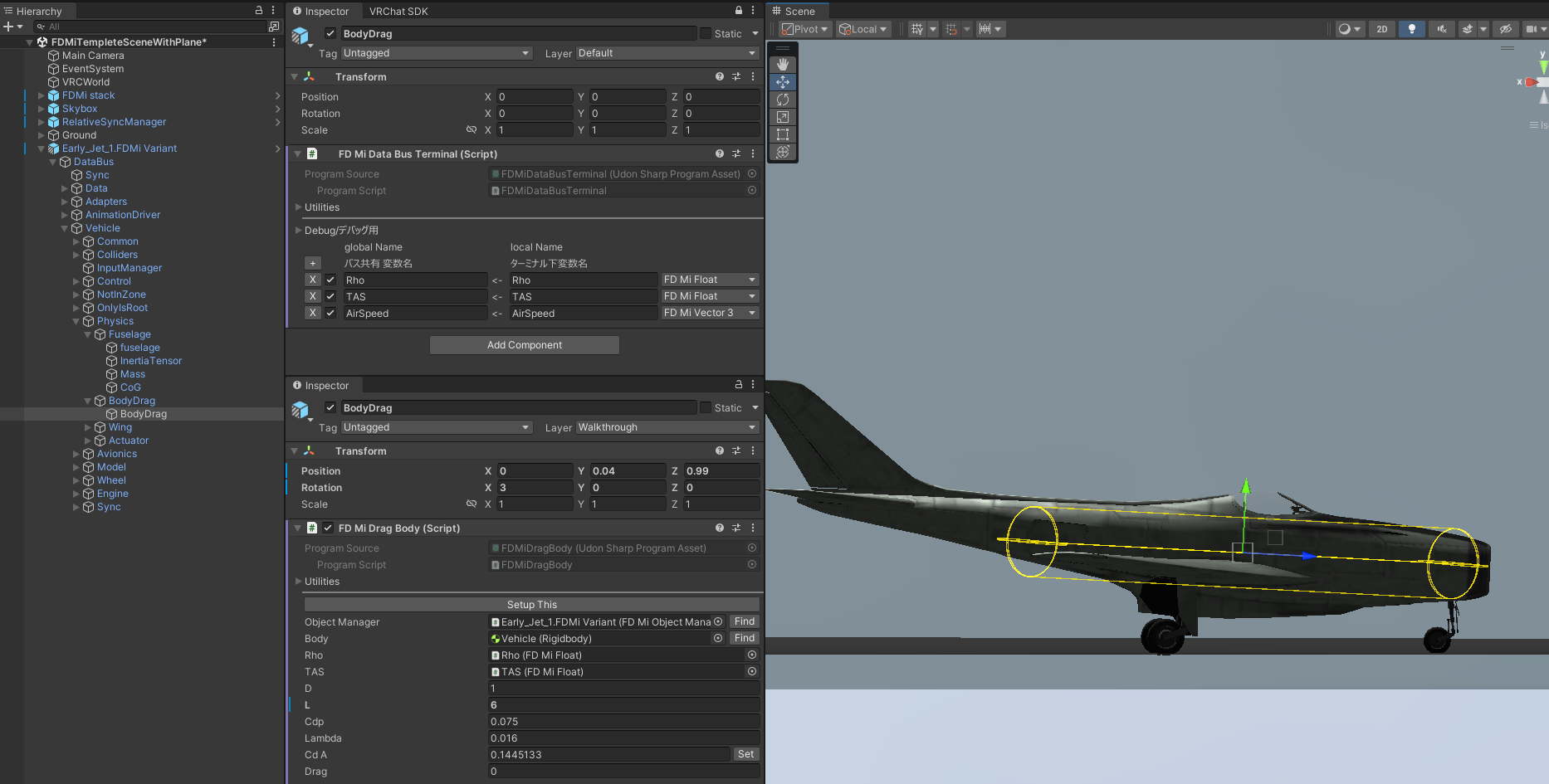
現状、胴体抵抗の計算が間違っています。調整は適当程度で済ませてください。
8. 操縦系
最後に、操縦系の設定を行います。 操縦系は、以下のように伝達します。
- パイロットの入力やオートパイロットが操舵量を出力します。
- 操舵量を
FDMiFloatMixer等で混ぜ合わせ、各舵の操舵量(通常 -1~1)を作成します。 - 翼に操舵量に対する効果を適用します。
※※ TODO (操縦系の概念図) ※※
操縦量の混ぜ合わせ
操縦量の混ぜ合わせはDatabus/Vehicle/Controlで行います。
FDMiFloatMixerを設定します。
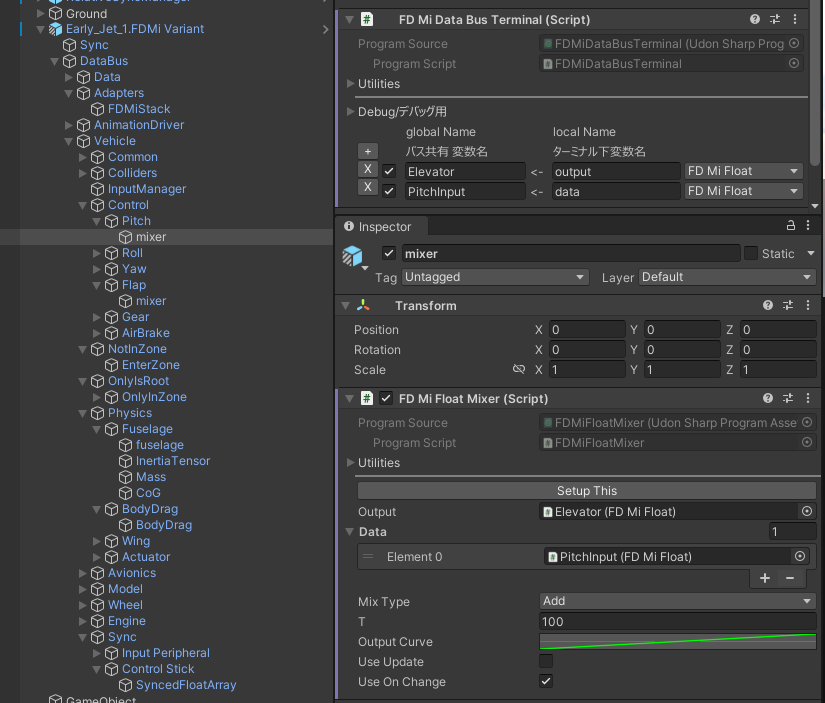
ここで作成したFDMiFloatの値を、舵面のアニメーションに適用することを推奨します。
操縦系の翼への適用
操縦系の適用は、2種類に分けて考えます
- 翼の角度変化(Transformの回転で達成)
- 翼への効果(Cl,Cdへの単純倍)
※ パイロットのみが計算を担当するよう、FDMiObjectActivateIsPilotの子に配置してください。通常Databus/Vehicle/Physicsの子に配置します。
今回はDatabus/Vehicle/Physics/Actuatorに配置しています。
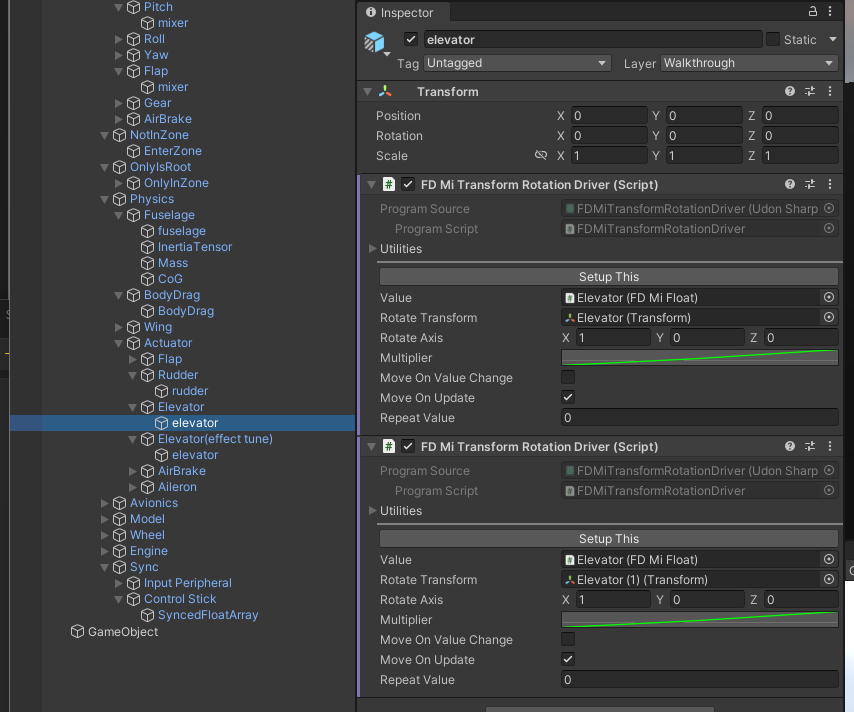
翼の角度変化
FDMiTransformRotationDriverを用い、翼のTransformを回転させます。
multiplierに、操舵量に対する舵の回転量を入力します。
翼への効果
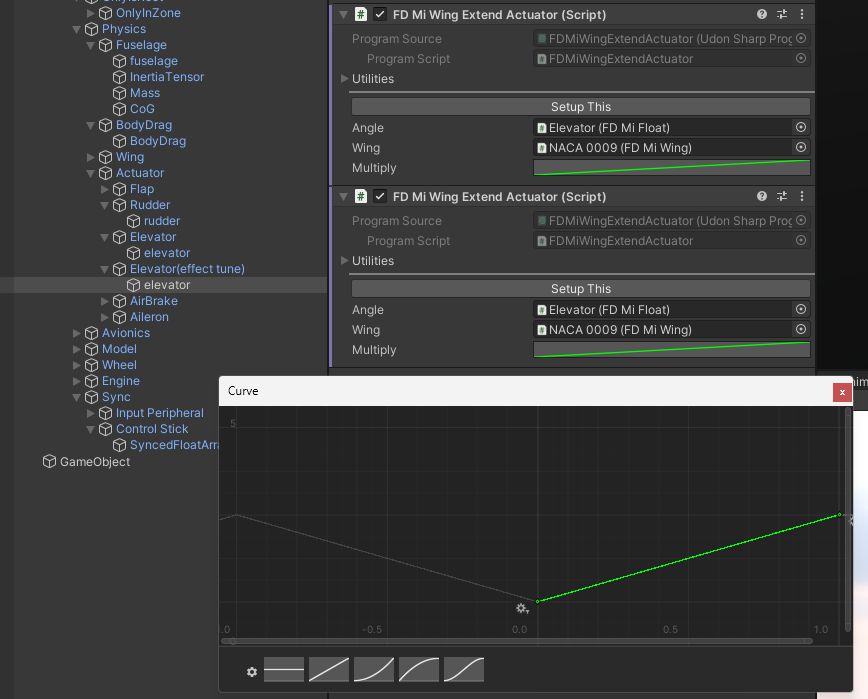
FDMiWingExtendActuatorを用います。
Multiplyに、操舵量に対する揚力/抗力の増加倍数を入力します。